Asymmetric DCC
Summary: Asymmetrical DCC is the term indicating an automation feature is available in some multifunction decoders.
|
See the Video. |
The Digital Command Control signal present on the rails is symmetrical, meaning the pulses on either rail are of equal amplitude. Asymmetrical means that one is not the same amplitude as the other. By insertion of a device between a segment of track and the power bus, an asymmetrical waveform can be created. Certain multifunction decoders are capable of detecting the lack of symmetry and acting upon that. An asymmetrical signal allows for a degree of automation, where a train may or may not stop at a signal or platform depending on direction.
How Asymmetrical DCC Works
The Digital Command Control waveform is symmetrical, meaning the pulses on Rails A and B are equal in amplitude.
To create the asymmetrical waveform, the DCC signal to one rail is fed through a circuit consisting of four diodes in series, with another reverse biased diode connected in parallel. When current flows through a diode, a voltage drop of approximately 700mV occurs. This results in the amplitude of the signal being reduced (or clipped) by 2.8V by the four diodes when forward biased.
Consider 16V (assuming no loss across the decoder) as the track voltage. With Rail B (Blue) energized the amplitude of the signal on the red rail is 16 − 2.8 = +13.2V as the current returns through the four (forward biased) diodes to the booster. When Rail A (Green) energized, the amplitude would be +15.3V (16 − 0.7) as the current flows to the red rail through the single forward biased diode, returning via the blue rail. The amplitudes would no longer be symmetrical in nature. This is possible because the four diodes create a 2.8V voltage drop. The single diode connected in reverse completes the circuit, allowing the current to pass through the load and return to the booster when the blue rail is energised.
Asymmetrical means lacking symmetry, thus the amplitude of the pulses on Rail A and B are not equal.
The waveform shows the voltage between the two rails. The first part shows a normal waveform, the second a waveform with positive asymmetry and finally, a waveform with negative symmetry. The difference can be used to determine if the modified signal is from the left or right rail, or in more practical terms, assuming the asymmetric signal is always on the right rail from the driver's perspective, "which direction is the locomotive facing?"
A compatible multifunction decoder has additional circuitry which compares the amplitude of the pulses on the rails. If one is less than the other by a pre-determined amount, a signal will be generated and sent to the multifunction decoder's microcontroller. This will trigger the braking routine. Additional CVs enable selecting left or right rail, for additional operational possibilities.
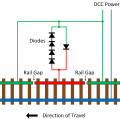
Circuit to provide Asymmetrical DCC. The right rail in the direction of travel is gapped. It is possible to use a switch to bypass the diodes, connecting the gapped section directly to the DCC bus, allowing the Asymmetric DCC signal to be used as needed.

Resulting amplitudes of the DCC signal, which are no longer symmetric. The rail with the reduced pulse amplitude can determine if the decoder will react or not.

Applications
Asymmetrical DCC is not used on the entire layout. It is only used on short, isolated sections of track. The diode module often has a connection for a bypass switch, so the user can activate or deactivate this feature. Multifunction Decoders which support these features are required.
Constant Stopping Distance
This feature (if available) allows a fixed stopping distance regardless of vehicle speed. When activated, the locomotive will come to a stop, within that distance. Pressing a Brake button or setting the speed to 0 triggers this feature. At slow speeds the result is prototypical.
Automatic Brake Control
- Main article: Automatic Brake Control


When the train enters the track section with the modified DCC waveform, the multifunction decoder senses the presence of the asymmetrical waveform and brings the train to a stop. Such as automatically stopping at the station platform. Or in the case of a terminal, before it runs out of track.
This feature could also be used in conjunction with a signalling system so the train does not enter a section when the signal is red, or stops before a diamond crossing without intervention. This would allow some automation where trains will not collide accidentally.
Another application is by wiring the diode module so it is controlled by a turnout, allowing a train to enter a passing siding and stop if the switch rails are not set correctly, instead of fouling the points and derailing. Or the train cannot leave that track until the switch is correctly aligned. When everything is aligned correctly, the module will be bypassed and the train can move again.
Devices for Asymmetric DCC
Lenz offers multifunction decoders as well as the following modules:
- BM1: Basic stop module
- BM2: Offers more sophisticated braking control for a single block, also actuates block signals and/or panel display LEDs.
- BM3: Controls a series of blocks, initiating braking if the next block is occupied. Can actuate block signals and/or panel display LEDs, and provides digital feedback.
- BM3K: Same as the BM3, intended for use with reversing sections.
- LG100 Brake Generator
- The brake module LG100 serves to provide prototypical slowing and stopping of digital locomotives in front of a 'red' signal.
The LG100 generates the control signals for a booster, just like the command station LZ100. The LG100 does not have an amplified output for connection to the track. For operation, a booster such as the LV100/LV102/LV103 or LV200 with is needed. Trains in both directions will stop.
Constructing a Diode Module for Asymmetric DCC
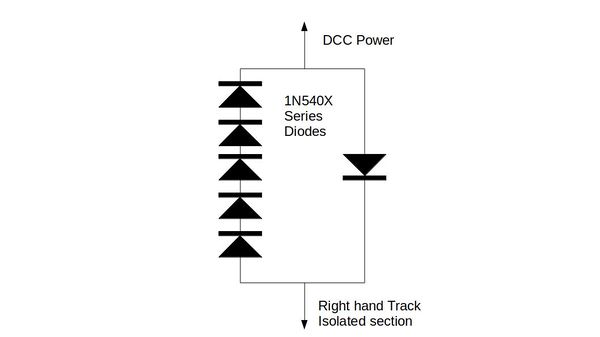
Schematic for a Diode Module
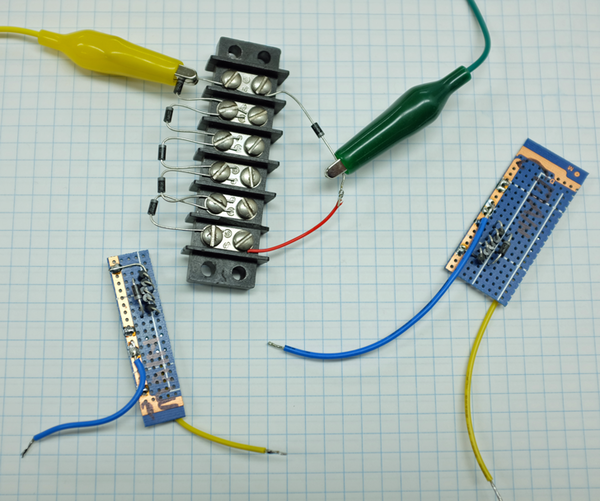
Modules with a test version mounted on a terminal strip
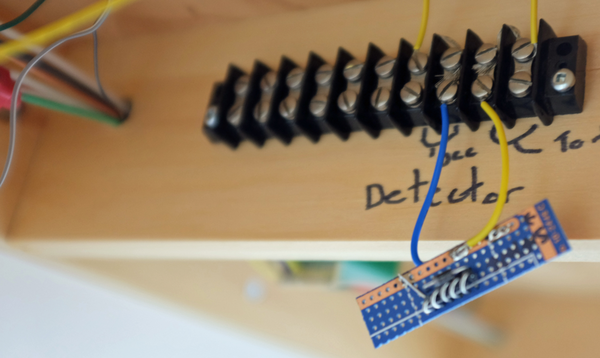
Completed module installed on layout



As shown in the image at the beginning of the article, the diode module consists of five diodes.
One can construct their own modules using commonly available parts. The basic specifications are a diode with a PIV of at least 50V, and a current capacity of 3A or more. Any generic rectifier diode will do. An example would be a 1N5400 –1N5408 series diode, rated at VFWD = 1V, IFWD = 3A, PIV = 400V. This type of diode is available a low cost. For best results a fast-switching diode, such as a Schottky diode, should be used. Slow diodes may not attenuate the signal enough for the decoder work. While the schematic shows 4 diodes in series, it is acceptable to add another diode if needed to get the waveform required.
How Does it Work?
When current flows from the booster through the single diode to the track, a 0.7V drop is introduced into the signal. When the phase inversion occurs, current flows through the four diodes in series, and a 2.8V drop occurs. The decoder compares the two pulses and seeing one is much lower than the other in amplitude, initiates the stopping process.
It is also acceptable to connect a toggle switch or relay across the diode module (in parallel) to allow the module to be bypassed if the automatic brake is not required at that time.
Remember: Multifunction Decoders which do not support Asymmetric DCC will ignore the altered DCC signal and continue on their way. If the track ends at the edge of the layout, a dead section would be a good idea, as well as some form of barrier.
Asymmetrical DCC in Operation
Automatic Brake Control using my own ABC modules, and Train Tech DCC signals.
See Also
- Automatic Brake Control
- Brake District: A form of power district that can be used for stopping a train automatically.
External Links
Lenz Patent Application (US): Method and apparatus for automatic train control in a digitally controlled model railroad system:
Abstract
- A method for automatic train control in a digitally controlled model railroad system includes detecting a polarity change of a track voltage applied to the track by means of a digitally controlled motor vehicle running on the track. The track voltage being a modulated control voltage which is normally symmetric and asymmetric in galvanically isolated track sections. After each detection of a change of polarity, the voltage level of the control voltage applied to the track is sampled independently for each rail of the track by means of the digitally controlled motor vehicle running on the track. The voltage values sampled for each rail of the track are compared to each other and evaluated with regard to any asymmetry occurring in the amplitude of the track voltage with reference to each rail of the track. Depending on the result of the evaluation, the travel operation of the motor vehicle is influenced that is otherwise controlled by the digital control system.